Menu
연구
연구실

컴퓨팅 제어공학 연구실(Computational Control Engineering Laboratory, CoCEL)은 2014년 9월에 "Control for Control"을 실현하기 위해 설립되었습니다.
우리는 혁신적인 기본 아이디어와 이론으로부터 출발하여, 학습 및 통계 추론, 신호 처리, 정보 이론, 통신, 사이버네틱스 등의 컴퓨팅 제어공학 다양한 분야의 다학제적 연구를 통해 패러다임을 전환하며, 세계를 바꿀 수 있는 계기 및 제어 기술을 구현하고 있습니다.
특히, 실시간 강화 학습, 수학적 계측, 모델 기반 배터리 정보학에 초점을 맞추어 집중적인 연구를 수행하고 있으며, 드론, SLAM, 인공지능, 에너지 등의 분야에서 연구 그룹을 운영하여 "컴퓨팅 제어공학"을 기반으로 한 "제어 기술"을 목표로 하고 있습니다.
세 개의 그룹은 서로 다른 분야에서 연구를 수행하지만, 핵심 기술은 매우 유사합니다. 최근, 네 개의 그룹의 연구가 상호 협력을 통해 수렴하고, 시너지 효과를 창출하고 있습니다.
첨단 제어 기술을 갖춘 시스템은 우리의 관심을 끌고 있습니다. 530km/h의 속도로 비행 중 10cm 크기의 충전 구멍을 통해 공중 분유하는 것을 볼 때, 이는 엄청난 현상입니다. 2022년, 우주선이 지구로부터 1100만 km 떨어진 곳에서 160m 크기의 소행성과 충돌하는 것을 많은 사람들이 놀라워하였습니다.
또한 SpaceX의 수직 착륙 로켓, 정교한 미사일 방어 미사일, 반도체 제조에서의 포토공정은 최첨단 제어 시스템 기술의 정점입니다. 특히, 포토공정의 정확도는 지구에 있는 동전을 명월에 발광체로 조준하는 것과 비교된다고 합니다. 이러한 최첨단 제어 시스템 기술들은 개방적이지 않으며, 산업간, 국가간에도 엄격한 보안이 요구됩니다.
최근에는 정밀 장비, 항공우주, 방위 분야와 같은 최첨단 산업에서 첨단 제어 시스템 기술에 대한 고급 수준의 지식이 요구되어, 소수 개발국가에서만 보유하고 있는 첨단 제어 시스템 설계 기술을 습득하는 것이 더 필요하다고 생각됩니다.
최적 제어 정책을 최적화하는 것은 AI 팀의 주요 연구 분야 중 하나입니다.
구체적으로, 삼중 역진자 막대와 고장난 모터를 가진 쿼드로터와 같은 매우 복잡한 동적 모델을 제어하는 데 초점을 맞추고 있습니다. 게다가 지연된 피드백으로 작동하는 로봇들의 제어 정책에 대해 적극적으로 연구하고 있습니다.
에너지팀은 국내 굴지의 배터리 제조업체와 협력하여 배터리 전류-전압 응답으로부터 이온 입자들의 전기화학 동역학에 기반하여 내부 상태를 추정하고 예후를 평가하는 알고리즘을 개발하고 있습니다.
드론팀은 기체의 항법 시스템, 효율 최적화, 제어 알고리즘 등 드론 운용을 위한 다방면의 연구를 진행하고 있습니다.
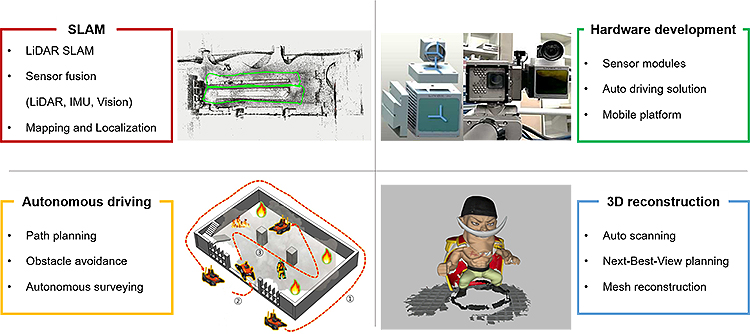
SLAM팀은 3차원 라이다 및 카메라 등 다양한 센서를 통한 모바일 로봇의 위치 추정 및 3차원 공간의 지도 작성 알고리즘을 개발하고 있습니다.
연구 목표는 최고의 컴퓨팅 제어 공학을 통해 '제어 기술로의 제어'를 달성하는 것입니다.
실용적인 작동 제어를 위해 지각-결정-행동을 거치는 폐쇄 루프 제어 시스템에 대한 새로운 관점과 접근 방식이 새로운 지평을 열게 될 것입니다. 또한 통신은 폐쇄 루프 제어 시스템에 흡수되어 사이버네틱스를 이끌게 됩니다.
CoCEL은 컴퓨팅 제어 공학의 패러다임 쉬프터이며, K-제어를 이끌 게임 체인저 역할을 합니다. 최신 기술에 대한 노력과 함께 CoCEL은 과거에 얻은 고전적인 지식을 새로운 분야로 전환하기 위해 노력할 것입니다.
연구 목표는 최고의 컴퓨팅 제어 공학을 통해 '제어 기술로의 제어'를 달성하는 것입니다.
실용적인 작동 제어를 위해 지각-결정-행동을 거치는 폐쇄 루프 제어 시스템에 대한 새로운 관점과 접근 방식이 새로운 지평을 열게 될 것입니다. 또한 통신은 폐쇄 루프 제어 시스템에 흡수되어 사이버네틱스를 이끌게 됩니다.
CoCEL은 컴퓨팅 제어 공학의 패러다임 쉬프터이며, K-제어를 이끌 게임 체인저 역할을 합니다. 최신 기술에 대한 노력과 함께 CoCEL은 과거에 얻은 고전적인 지식을 새로운 분야로 전환하기 위해 노력할 것입니다.